
Le matériel nécessaire est prêté gratuitement par ESERO (prenez contact avec ESERO : contact@esero.lu ou +352 621 96 90 19).
4.2 Planification de l’unité
01
Sujet de l’unité dans la structure globale des axes

Comme les modules sont indépendants les uns des autres, il n’est pas nécessaire d’avoir pris connaissance des modules précédents pour traiter celui-ci. Si plusieurs modules sont réalisés, il est recommandé de planifier le module #Involution avant le module #Discover Life on Mars with a Rover.
Ce module a été conçu en collaboration avec Frederic Cornrotte de ESERO Luxembourg. ESERO est le volet éducatif de l’ESA (European Space Agency). Il amène l’espace dans les salles de classe en développant de nouveaux supports pédagogiques interactifs, en organisant des concours et en proposant régulièrement des formations aux enseignants.
02
Modalités de l’unité
a) Année d’étude : 7e – 5e classique et général – cours avancé et de base
b) Local : possibilité de présentation à l’aide d’un vidéoprojecteur.
c) Matériel :
- une zone libre au sol de 6 m² : 3 m x 2 m
Par groupe de 2 élèves :
- Un ordinateur portable ou PC avec Windows ou macOS
- Une connexion internet
- Un port USB disponible
- Le logiciel mBlock installé
Le reste du matériel est fourni par ESERO (prenez contact avec ESERO : contact@esero.lu ou +352 621 96 90 19)
- la carte de Mars
- le matériel de décoration nécessaire aux défis :
- 3 photos pour le décor,
- des fixations pour tenir les photos,
- une grotte,
- un tardigrade en peluche,
- une source de chaleur
- la peluche Paxi qui est la mascotte d’ESERO
- des autocollants de Paxi
- 10 mBot équipés avec tous les capteurs nécessaires, pour une classe de 20 élèves maximum.
d) Aucune connaissance préalable en programmation n’est nécessaire.
e) Durée : 100 minutes – 2 heures d’enseignement ou 200 minutes – 4 heures d’enseignement
03
Contextualisation des Savoirs
En février 2020, le ministère de l’Éducation nationale a présenté la stratégie « einfach digital – Zukunftskompetenze fir staark Kanner », dont l’objectif est de préparer les enfants et les adolescent·e·s aux exigences de l’avenir, de les aider à s’orienter dans un monde de plus en plus marqué par le numérique et de leur permettre d’acquérir les compétences nécessaires à cet effet. La nouvelle matière Digital Sciences a été introduite dans le cadre de cette stratégie. Digital Sciences s’inscriz dans la continuité de l’enseignement du coding à l’école primaire et se concentrent sur six grands thèmes : les algorithmes, l’Internet, le langage informatique, le jeu, les robots et l’intelligence artificielle (ministère de l’Éducation nationale, 2020).
Le module #Discover Life on Mars with a Rover fait suite à l’accent mis sur le codage et l’inclut dans les thèmes de la Space Education et de l’Educational Robotics. Cela permet, d’une part, de maintenir les environnements d’apprentissage mis en place dans l’enseignement fondamental grâce au microcontrôleur Kniwwelino®, au robot éducatif Ozobot® ou encore au Lux-Robo Modikit : le robot mBot utilisé dans ce module PITT dispose également des capteurs correspondants et peut être piloté – comme Ozobot® – via un environnement de programmation par blocs, ce qui permet de réactiver et d’adapter les connaissances déjà acquises dans le domaine du codage (ministère de l’Éducation nationale, 2021). D’autre part, la mise en situation et la contextualisation scientifique dans le cadre de l’enseignement de l’espace permettent une connexion avec le monde réel. Les boucles de retour didactiques favorisent un apprentissage autonome des langages de programmation.
04
Transposition didactique
a. Objectifs d’apprentissage et compétences visées
b. Justification didactique
c. Réduction didactique
Les élèves connaissent les bases du codage par blocs et les ont testées et adaptées en fonction de l’application. Ils ont ainsi développé des stratégies de solution de manière coopérative et y ont réfléchi de manière métacognitive en se documentant en autonomie.
Compétences visées du Guide de référence pour l’éducation aux et par les médias1
- Compétences 1 – Informations et données : 1.2 Analyser et évaluer des données, des informations et des contenus numériques
- Compétences 2 – Communication et collaboration : 2.1 Interagir avec autrui
- Compétences 3 – Création de contenus : 3.3 Modéliser, structurer et coder
- Compétences 5 – Environnement numérique : 5.1 Résoudre des problèmes techniques simples
Afin de garantir la poursuite de l’éducation et de la formation au codage entre l’enseignement fondamental et l’enseignement secondaire dans l’esprit des sciences numériques et de la construction des niveaux de compétence explicitée dans le guide de référence pour l’éducation aux et par les médias1, ce module prévoit des tâches plus complexes basées sur le codage en bloc. L’objectif est « d’identifier les aspects des problèmes du monde réel qui se prêtent à une modélisation informatique, d’évaluer des solutions algorithmiques à ces problèmes et de les développer soi-même de manière à ce que ces solutions puissent être mises en œuvre par ordinateur » (Boualam et al., 2021). #Discover Life on Mars with a Rover vise ainsi les contenus d’apprentissage de la pensée computationnelle et met à disposition des méthodes et des outils exemplaires pour acquérir les connaissances et les compétences fondamentales et essentielles pour le développement ultérieur des aptitudes informatiques.
Le présent module favorise et soutient les capacités d’abstraction et de reconnaissance de modèles requises par la modélisation informatique des problèmes du monde réel en intégrant la robotique éducative dans l’environnement d’apprentissage. Outre l’augmentation de la motivation d’apprentissage par des missions ludiques de codage et les méthodes coopératives de résolution de problèmes, la réactivité et la clarté de la programmation robotique jouent un rôle essentiel :
Numerous studies […] have shown that poor engagement and retention statistics in courses such as Introduction to Programming […] often arise from student’s inability to see how the skills they learn can have a concrete impact on what they care about: their physical world; their friends and family. Physical robot programming projects can cast coding problems into the real world, making those skills push back on one’s world and thereby achieve a level of significance and engagement that, for instance, computation of the Fibonacci Sequence on a computer screen cannot inspire. (Miller & Nourbakhsh, 2016)
Le principe didactique de l’apprentissage constructiviste est ainsi transformé en apprentissage constructionniste, comme Eguchi le souligne à la suite de Papert & Harrel (1991) : « With constructionist learning, the object to think with is built or made, and what is physically constructed can be publicly shared – shown, discussed, examined, and admired » (Eguchi, 2017, 11). La possibilité de vérifier immédiatement, à l’aide d’un robot, la cohérence et le fonctionnement des blocs de code composés de manière autonome à partir d’instructions de programmation discrètes et prédéfinies permet un apprentissage autodirigé, dans lequel les boucles de feed-back se font directement par le biais du matériel d’apprentissage utilisé. La vérification, la discussion et l’adaptation des instructions de programmation en binôme visent à entraîner les capacités métacognitives pour consolider les résultats de l’apprentissage.
05
Déroulement de l’unité
Le fonctionnement et l’utilisation de l’interface utilisateur de mBlock sont étudiés par les élèves, à la maison, en amont du double cours suivant. Cette approche dite de classe inversée laisse plus de temps pendant la phase de présence pour réaliser les missions individuelles et permet aux élèves d’acquérir des expériences pratiques dans l’utilisation du codage en bloc avant le cours.
Le cours commence par l’entraînement des pilotes en binômes : au début du cours, les élèves sont répartis en groupes de deux par kit mbot préparé. Le rôle du pilote est attribué et expliqué via un tableau blanc et/ou des fiches de travail (sous forme imprimée ou sur tablettes). Les questions peuvent être discutées et les réponses apportées directement en plénière. Dès que tous les élèves ont terminé l’entraînement des pilotes avec succès, l’enseignant·e peut résumer les objectifs d’apprentissage de l’entraînement des pilotes, puis expliquer la mission suivante.
Selon le niveau de connaissances et la dynamique du groupe et le degré de différenciation interne nécessaire, il est possible de réaliser jusqu’à quatre missions par double cours pendant la phase d’élaboration. Il est également possible de remplacer les deux dernières missions par une évaluation au cours de laquelle les élèves écrivent eux-mêmes un programme afin d’atteindre un objectif formulé de manière autonome à l’aide du mBot. Si trois à quatre cours peuvent être consacrés au module, toutes les missions peuvent être réalisées et se terminer par l’évaluation.
Toutes les missions sont construites selon le même schéma et sont expliquées par des fiches de travail (sous forme imprimée ou sur tablettes). Pour chaque mission, un fichier contenant une partie du code peut être téléchargé. Les élèves ne doivent donc pas programmer intégralement la mission, ce qui permet à celles et ceux ne connaissant pas Scratch de réaliser ce module.
Dès qu’une mission est terminée, la mission suivante peut être distribuée. Il faut particulièrement veiller à ce que les élèves commentent les codes pendant la programmation et l’expérimentation avec le mBot et réfléchissent à leur propre processus de travail.
Demander une intervention en classe :
Vous pouvez également nous contacter pour que nous intervenions dans votre classe avec ce module.
06
Possibilités de différenciation
La possibilité d’échelonner individuellement les missions permet de différencier en interne le degré de difficulté et le niveau de performance. Les groupes indiquent eux-mêmes le temps dont ils ont besoin pour terminer la mission. Une fois qu’une mission est terminée, il est possible de travailler sur la mission suivante, qui est plus difficile. Si plus de différenciation est nécessaire, les enseignant·e·s ont la possibilité de laisser les élèves programmer les missions à partir de zéro. Au lieu de télécharger le fichier contenant une partie de la solution, les élèves peuvent juste programmer dans une feuille vide dans mBlock.
07
Autres critères à remplir dans le cadre de la série des unités
- Contexte luxembourgeois : le module est le résultat d’une coopération entre ESERO (European Space Education Research Office) Luxembourg et PITT. Les objectifs d’apprentissage et les compétences visés sont tirés du guide de référence pour l’éducation aux et par les médias luxembourgeois et de l‘axe thématique 5 de la matière Digital Sciences.
- Différenciation : l‘apprentissage autodirigé ainsi que l’échelonnement des tâches d’élaboration en fonction du degré de difficulté permettent plusieurs niveaux de différenciation.
- Guide de référence pour l’éducation aux et par les médias luxembourgeois : cf. les objectifs d’apprentissage visés par le cadre d’éducation aux médias dans le cadre de la transposition didactique du présent document.
- Compétences 4C : Critical Thinking (Pensée critique), Créativité, Coopération, Communication. Le modèle 4C est pris en compte de diverses manières par les différentes formes sociales et activités d’enseignement.
- Lien avec la recherche actuelle : la conception de rovers capables de naviguer sur la Lune ou sur Mars est un sujet de recherche très actuel pour préparer les prochaines missions sur la Lune et sur Mars.
- Lien avec la recherche actuelle au Luxembourg : l’industrie spatiale et la recherche dans le domaine spatial sont en développement au Luxembourg. Dans l’interview avec Miguel Olivares-Mendez, nous évoquons, entre autres, le rôle de l’Université du Luxembourg dans la recherche spatiale.
08
Planification détaillée de la leçon
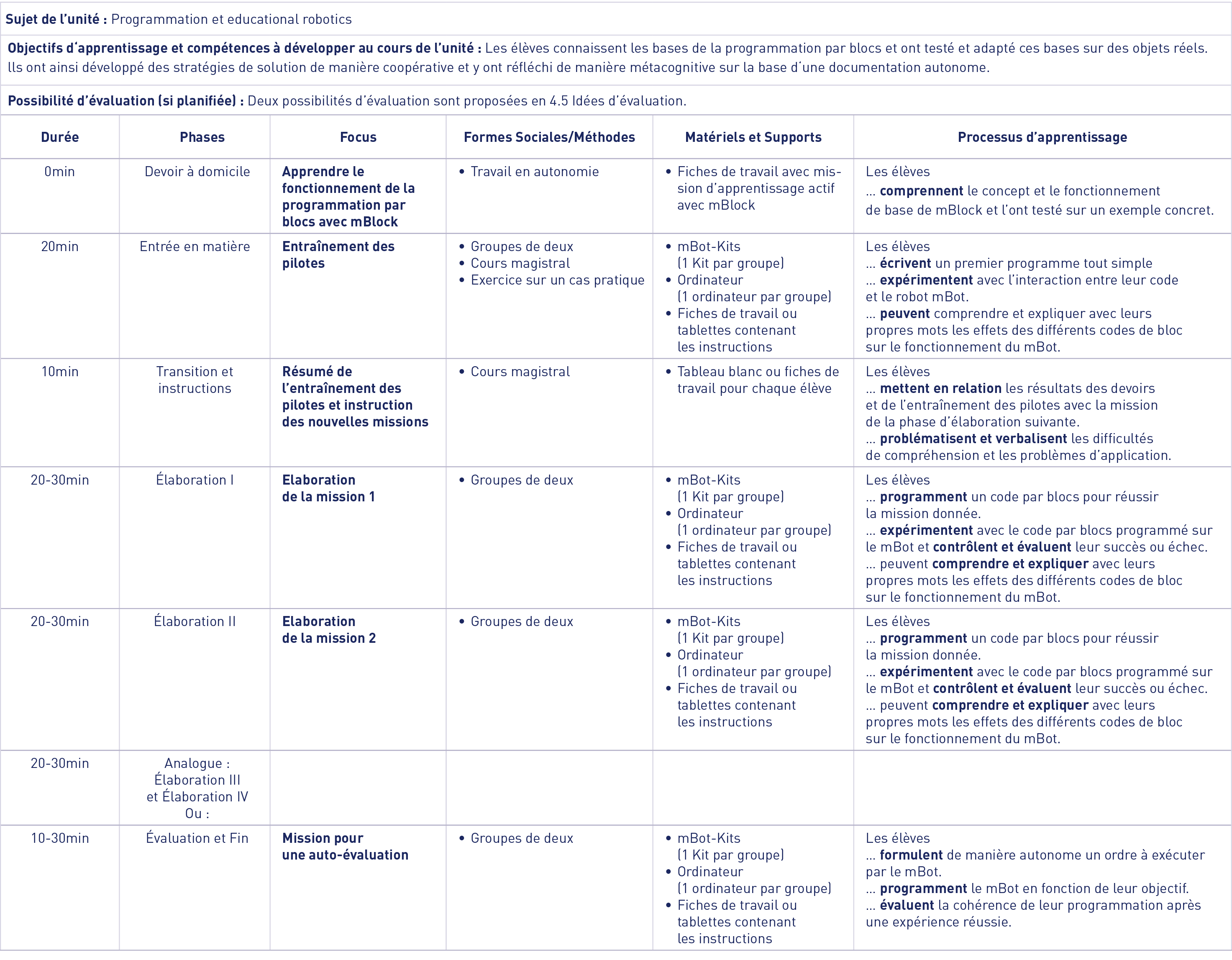
Cliquer sur l’image pour agrandir
Références
Eguchi, Amy. (2017). Bringing Robotics in Classrooms. In: Myint Swe Khine (Ed.), Robotics in STEM Education: Redesigning the Learning Experience. Cham: Springer, 3-31.
Miller, David P. & Nourbakhsh, Illah. (2016): Robotics for Education. In: Khatib, Oussama & Siciliano, Bruno (Eds.), Springer Handbook of Robotics. Second edition. Berlin/Heidelberg, 2115-2134.
Ministère de l`Education nationale. (2020). Dossier de presse du 06 février 2020: einfach digital – Zukunftskompetenze fir staark Kanner. https://men.public.lu/content/dam/men/catalogue-publications/dossiers-de-presse/2019-2020/einfach-digital.pdf
Ministère de l`Education nationale. (2021). EDI. Infomagazin fir Elteren 2, 23-26. https://men.public.lu/dam-assets/catalogue-publications/edi-infomagazin-fir-elteren/2021/02-2021-edi-infomagazin-elteren.pdf
Papert, Seymour., & Harel, Idit. (1991). Constructionism . New York, NY: Ablex Publishing Corporation.
