
Le matériel nécessaire est prêté gratuitement par ESERO (prenez contact avec ESERO : contact@esero.lu ou +352 621 96 90 19).
4.3 Matériels pédagogiques
M1
Instructions pour les enseignant·e·s
Présentation du rover mBot
Le mBot est un robot pour débutants créé par la société MakeBlock, qui rend l’enseignement et l’apprentissage du codage de robot simple et amusant. Grâce aux instructions pas à pas, les élèves se familiarisent avec les principes fondamentaux de la programmation par blocs, développent leur raisonnement logique et leurs capacités de conception.
Comme tout robot, le mBot interagit avec son environnement en fonction des instructions qu’on lui demande d’exécuter.
Pour cela, il est capable de collecter des informations grâce à ses capteurs et de réaliser des actions grâce à ses actionneurs.

Actions
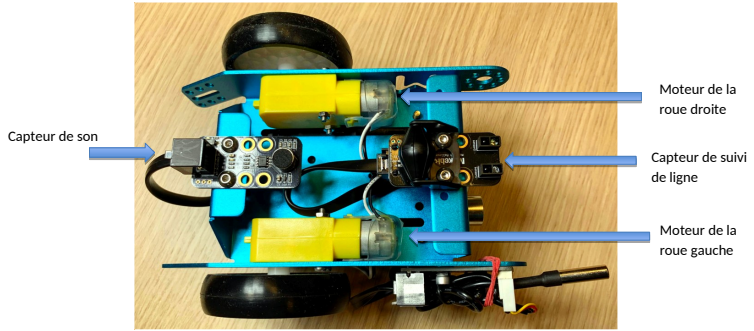
Le robot est capable de se déplacer grâce à ses deux moteurs indépendants qui pilotent chacun une roue motrice.
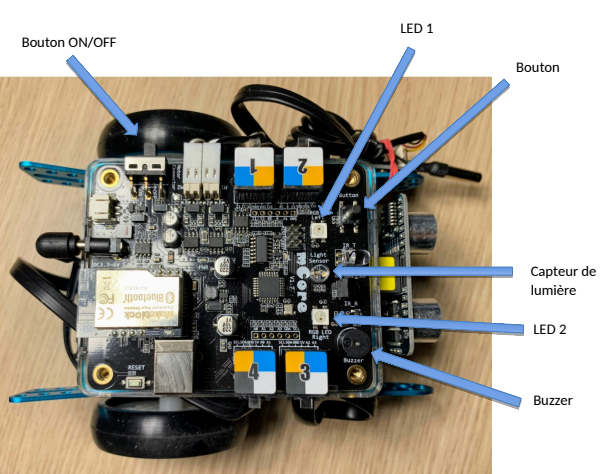
- Il peut émettre des sons grâce à un buzzer.
- Il peut émettre de la lumière grâce à des lampes LED dont la couleur est paramétrable.
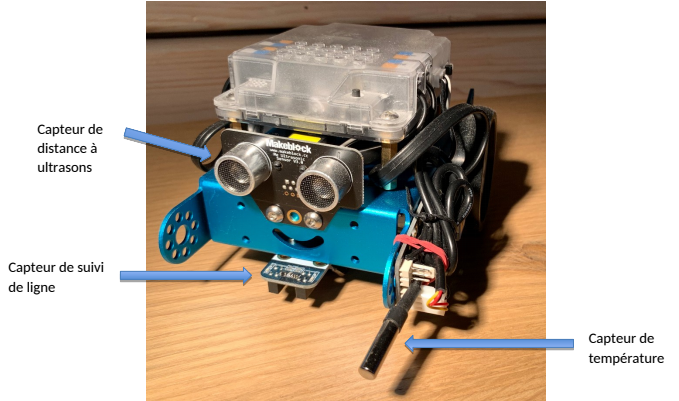
- Pour interagir avec son environnement et y recueillir des informations, on retrouve sur le robot :
-
- un bouton de mise sous tension ON/OFF,
- un bouton de lancement de programme,
- un module de suivi de ligne au sol,
- un module à ultrasons qui lui permet de « voir » les obstacles à l’avant et d’en connaître la distance,
- un capteur de luminosité qui le renseigne sur la luminosité ambiante,
- un capteur de son qui le renseigne sur le niveau du bruit ambiant,
- un capteur de température qui mesure la température de l’air ambiant.
- un capteur de suivi de ligne
Installé à l’avant du mBot, le suiveur de ligne est doté de deux capteurs capables de détecter une surface blanche (dans une fourchette de 1 à 2 cm), en émettant une lumière IR (infrarouge) et en enregistrant la quantité de lumière réfléchie.

Si une grande quantité de lumière est réfléchie, on peut en déduire qu’il est proche d’une surface blanche. Si la réflexion est faible, on peut en déduire que la surface est noire ou que le capteur n’est pas proche d’une surface.
Localiser les boutons et les capteurs :
Le robot mBot est programmé via le logiciel mBlock. Ce logiciel peut être téléchargé en version pc (sur des ordinateurs Windows ou Mac) ou en version app (pour Android ou iOS). Il est également possible d’utiliser la version web du logiciel. Ceci est particulièrement utile pour le devoir à domicile que les élèves doivent faire avant la leçon.
|
Utilisation du logiciel de programmation : |
|
|
1. Ouvrez le programme mBlock. |
 |
| 2. En haut à gauche de l’écran, choisissez votre langue en cliquant sur l’icone. |  |
| 3. Dans l’onglet « Appareil » à gauche, supprimez l’appareil CyberPi en cliquant sur la croix. |  |
| 4. Toujours dans l’onglet « Appareil », cliquez sur le bouton « ajouter ». |  |
| 5. Choisissez le mBot et cliquez sur « OK ». |  |
| 6. En bas de l’écran, cliquez sur « Extension ». |  |
| 7. Ajoutez l’extension « Gadgets de détection ». |  |
Description de l’interface de programmation
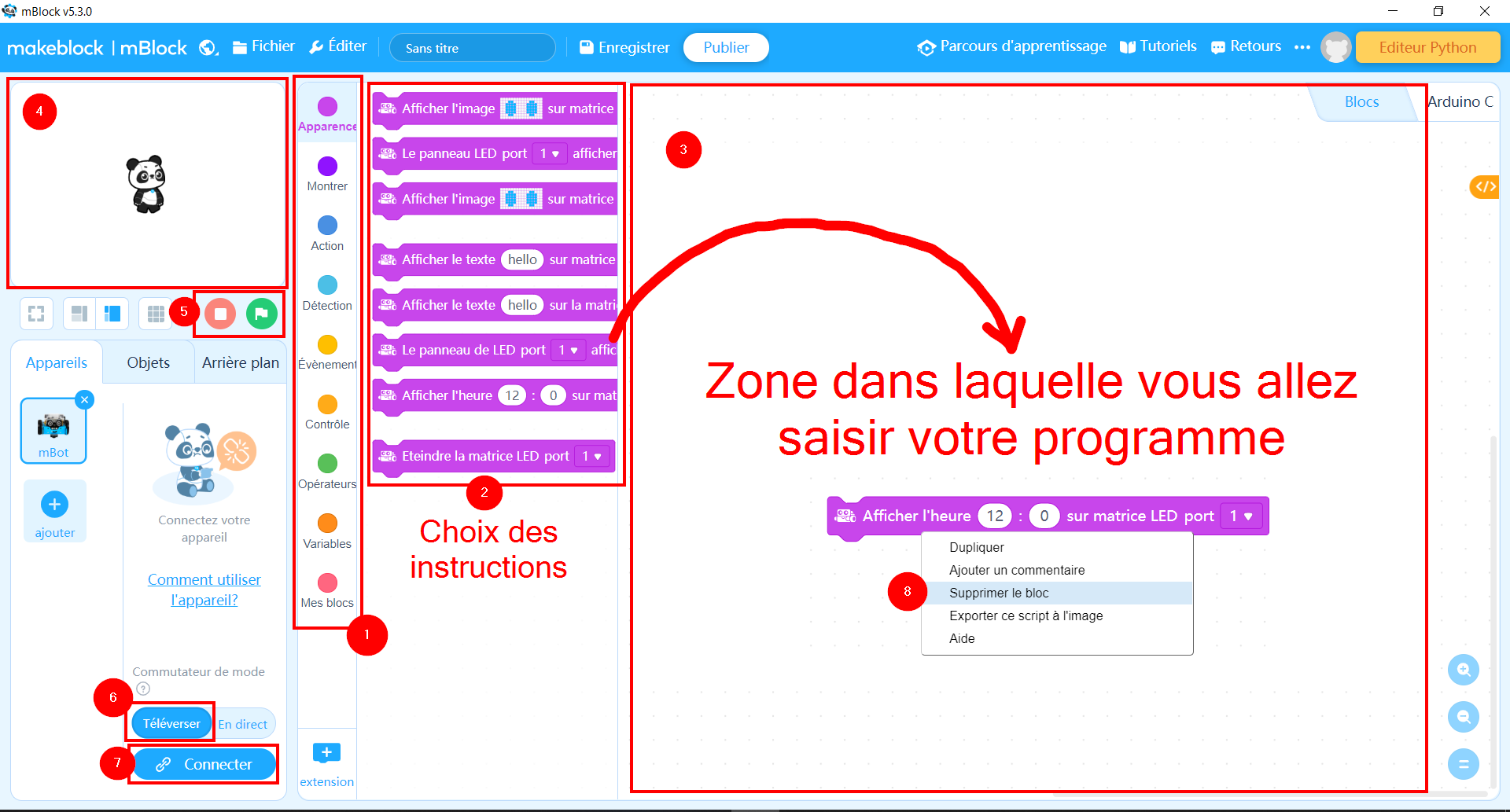
Cliquer sur l’image pour agrandir
Pour créer le programme, il suffit de glisser les éléments de la bibliothèque dans la zone de création du programme.
Attention, il faut parfois les déposer avec précision pour que cela s’imbrique.
| (1) Zone de sélection d’une bibliothèque d’instructions | (5) Démarrage/arrêt du programme quand vous programmez une image |
| (2) Zone de choix d’une instruction à glisser-déposer dans la zone (3) | (6) Bouton à sélectionner pour téléverser votre programme dans le mBot |
| (3) Zone dans laquelle vous saisissez votre programme | (7) Bouton à cliquer pour vous connecter au mBot |
| (4) Zone de test pour programmer une image à la place du mBot | (8) Pour supprimer une instruction, clic droit -> supprimer le bloc |
Procédure d’envoi du programme dans le mBot
- Poser le robot sur un support, branchez-le à l’ordinateur.
- Vérifiez que le commutateur du robot est bien sur « ON »
. - Assurez-vous que le bouton « Téléverser » est sélectionné. (1)
- Cliquez sur le bouton « Connecter ». (2)
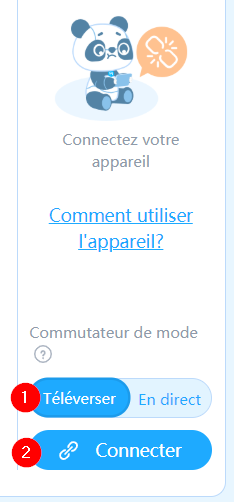
- Dans l’écran suivant, cliquez sur « Connecter ». (3)

- Quand la connexion est établie, cliquez sur le bouton « Télécharger » (4)

Présentation de la carte de Mars

La carte est une vraie image satellite qui a été prise par le satellite Mars Express de l’ESA en novembre 2018.
Elle est divisée en 9 zones qui seront mentionnées lors de la description de chaque mission.

Mise en place
- Placez la photo de la base martienne au coin de la zone 3
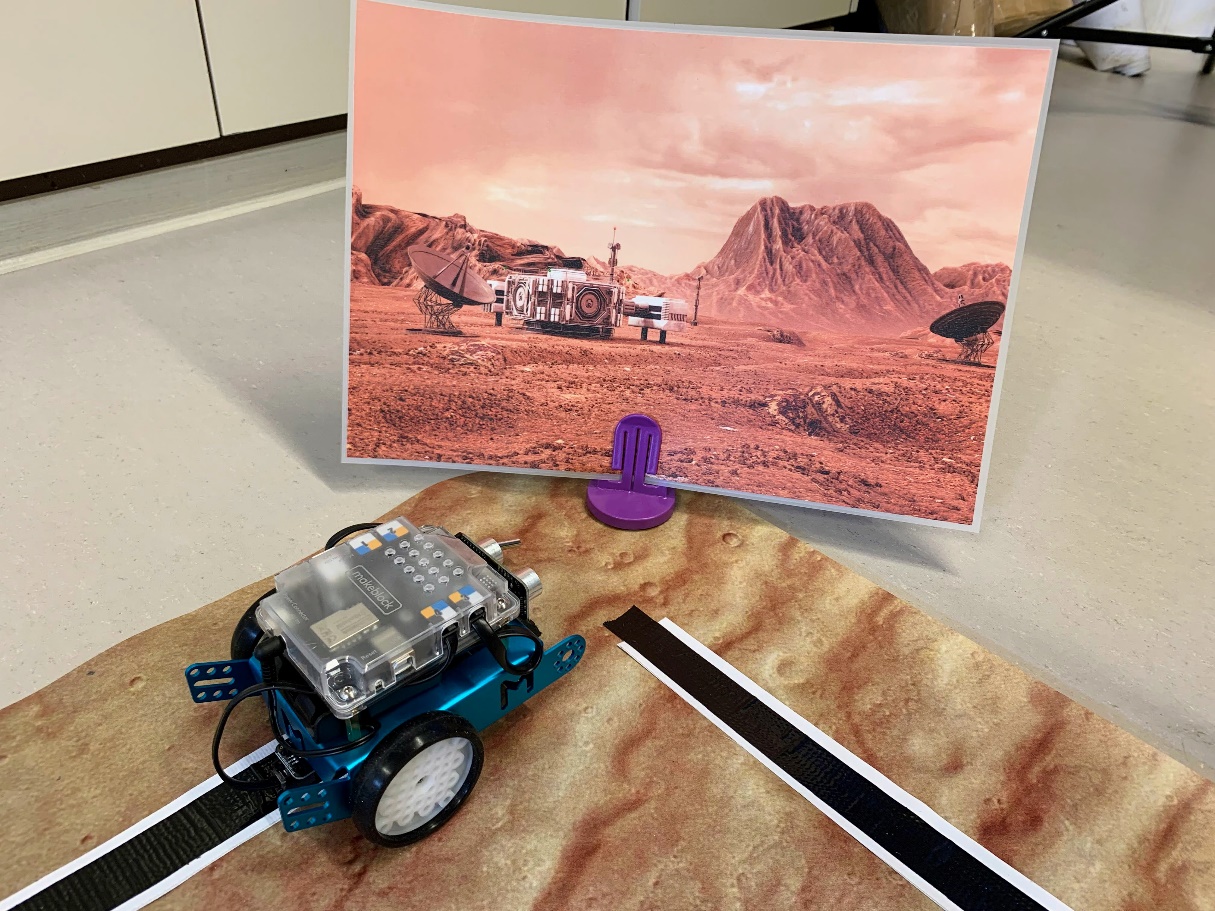
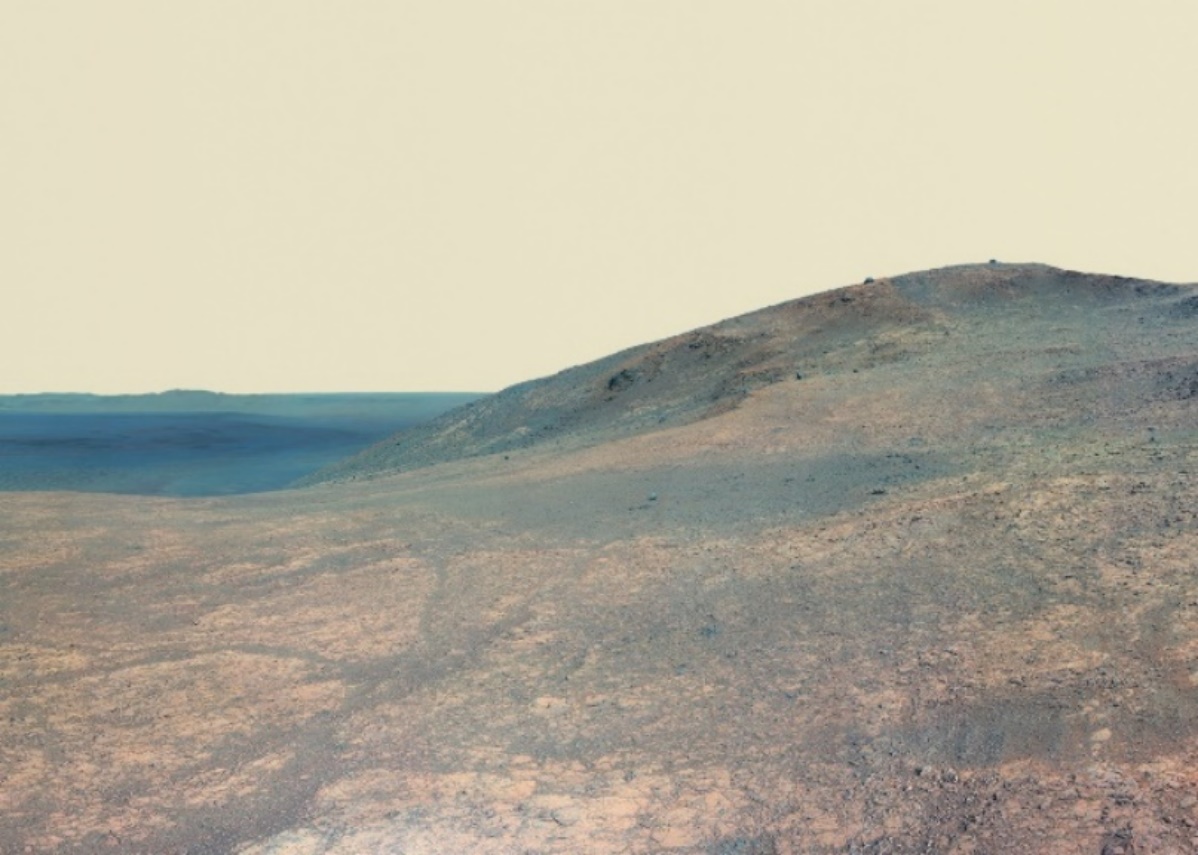
- Placez la photo du paysage de Mars juste à l’extérieur de la carte, à côté de la zone 6.
- Placez l’image du Olympus Mons verticalement au bout de la route, sous la zone 9 de la carte.
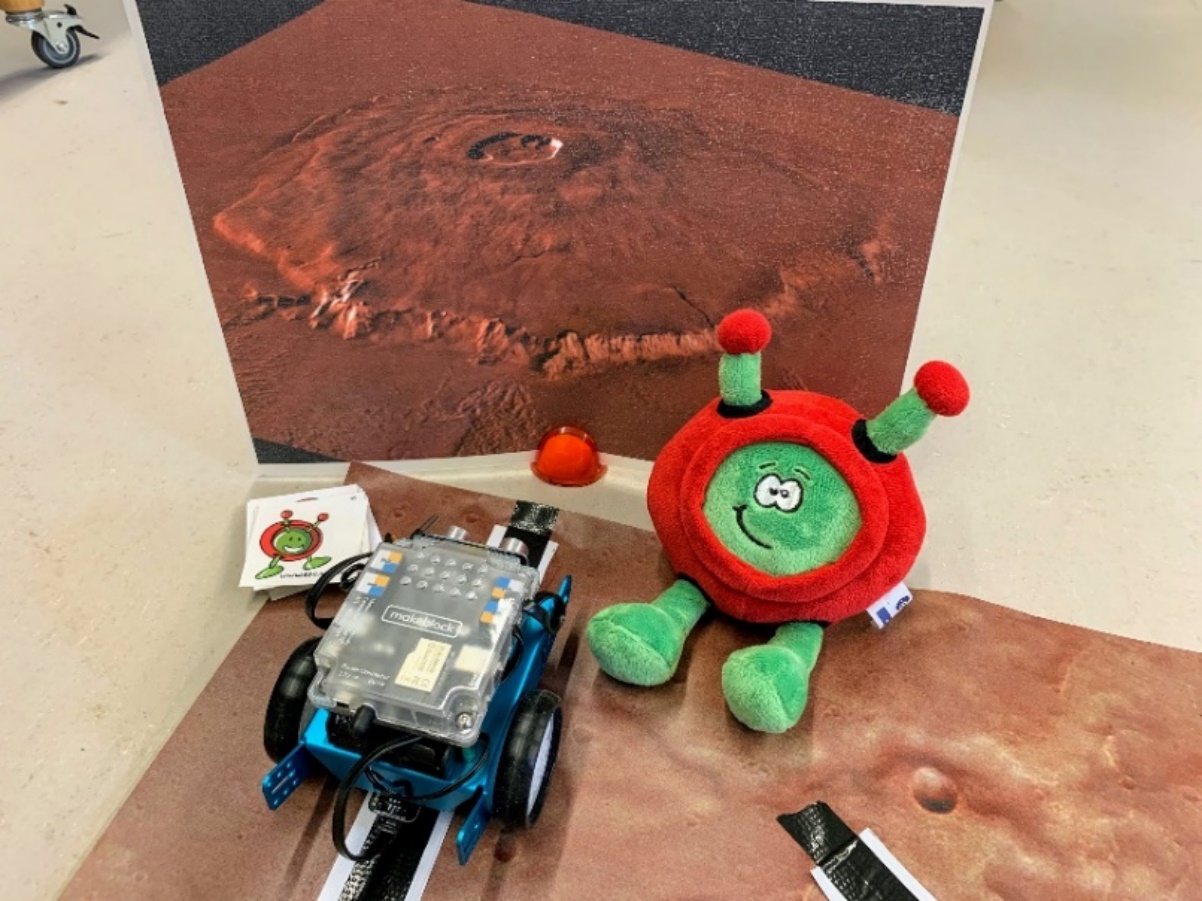 Placez Paxi (la mascotte de ESERO) et les autocollants de Paxi à côté du mont Olympe.
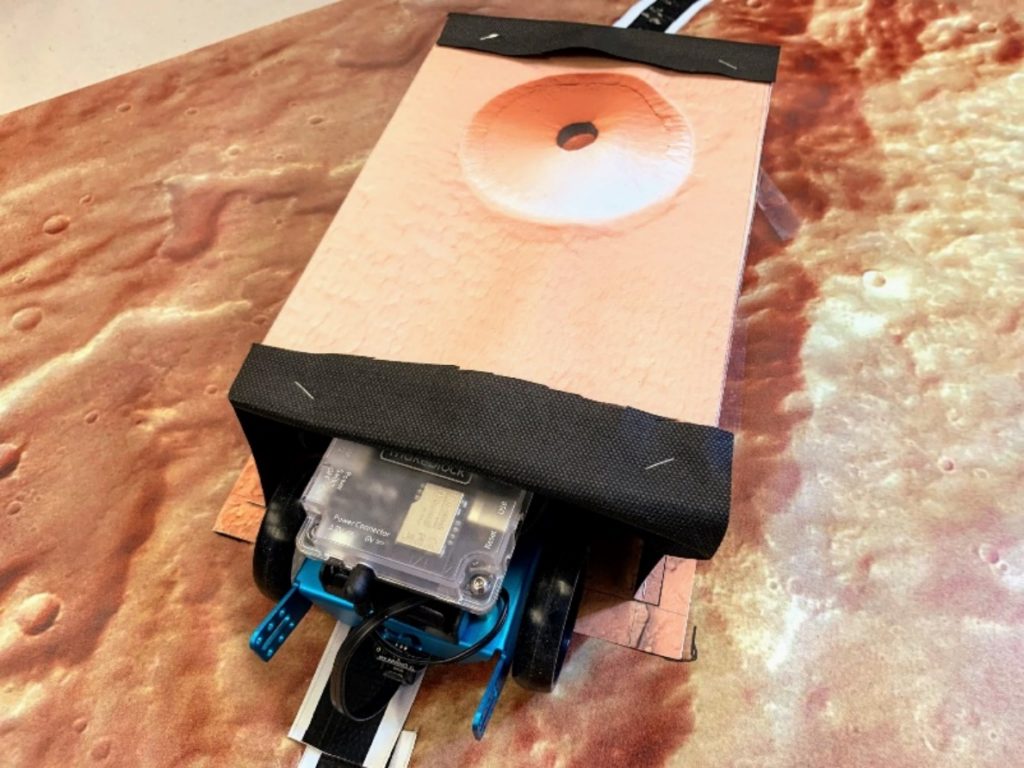
Placez Paxi (la mascotte de ESERO) et les autocollants de Paxi à côté du mont Olympe. - Placez la grotte de Mars sur la zone 8, collez-la à la carte avec du ruban adhésif, placez le morceau de route noire traversant la grotte et collez-le également à la carte.
- Sur la zone 1, placez l’image d’impact du cratère de Mars verticalement au bout de la route. Placez une source de chaleur à gauche de la route, juste devant l’impact du cratère de Mars. Placez l’image du tardigrade sous la source de chaleur et le tardigrade en peluche à côté de la source de chaleur.
Préparation de la leçon
- Afin d’être plus à l’aise, nous vous conseillons fortement de lire, comprendre et tester les solutions aux 4 missions avant d’entamer la leçon avec les élèves.
- Assurez-vous qu’une batterie lithium ou des piles AA sont chargées sur le mBot
- Connectez le rover à votre PC à l’aide du câble USB
- Appuyez sur le bouton ON.
Lire son premier programme
Afin de se familiariser avec le programme mblock, les élèves doivent faire un premier exercice à la maison pour préparer la leçon. Cet exercice peut être fait sur la version web du programme mblock. Il·elle·s ne doivent donc rien installer. Demandez aux élèves de réaliser les opérations suivantes :
- Aller dans le menu Tutoriels -> Programmes d’exemples
- Sélectionner la scène -> Happy Panda
- Appuyer sur « OK »
Vérifiez que les élèves ont compris
- comment le Panda est contrôlé par les blocs de couleur. Les blocs de couleur représentent les instructions à suivre . Il n’est pas nécessaire d’expliquer tous les blocs en détail. Les élèves doivent découvrir par eux·elles-mêmes ce qu’il·elle·s peuvent faire avec chaque bloc.
- la fonction du drapeau vert et du carré rouge.
Demandez ensuite aux élèves de changer le message en chinois dans le bloc « say » et de montrer ce que cela change lors de l’exécution du programme. Encouragez-les à jouer avec le programme et à découvrir les fonctionnalités par eux-mêmes.
C’est parti !
La leçon peut commencer. Le jeu de programmation est divisé en 4 missions, précédé par un défi test, appelé entraînement des pilotes, à relever en programmant le mBot pour qu’il effectue des tâches spécifiques.
Comme ce module constitue pour beaucoup d’élèves une première familiarisation avec la programmation par blocs, les élèves ne doivent pas programmer chaque exercice de zéro. Des fichiers contenant une partie de la solution sont donnés à la fin de chaque mission. Les élèves doivent donc seulement les compléter afin d’obtenir la solution finale. À cette fin, les élèves doivent sauvegarder les fichiers sur leur ordinateur puis les ouvrir, toujours sur leur ordinateur, depuis l’interface mBlock.
Pour les classes d’élèves ayant déjà travaillé sur Scratch ou un autre langage de programmation par blocs, rien ne vous empêche de ne pas utiliser ces fichiers et de laisser les élèves programmer entièrement les missions.
Les missions ont été conçues pour être de difficulté croissante, en demandant d’abord aux élèves de se concentrer sur les valeurs des variables (mission 1), puis sur la logique du programme (mission 2), pour ensuite mélanger les 2 aspects (missions 3 et 4).
Écrivez votre premier programme : entraînement des pilotes
Pour ce premier exercice, la mission consiste à
- faire rouler le mBot tout droit sur la table,
- arrêter le mBot dès qu’il se retrouve à moins de 10 cm d’un obstacle en utilisant le capteur à ultrasons. L’obstacle peut être la main de l’élève, un livre ou n’importe quel autre objet.
Mission 1
Contexte :
Le rover se trouve au centre de la carte, dans une vallée asséchée, et reçoit l’ordre de retourner à sa base d’origine pour recevoir une nouvelle mission.
Mission :
Les élèves doivent retourner à la base de la zone 3 en suivant la ligne noire avec le capteur de suivi de ligne.
Dans la bibliothèque d’instructions « Détection », il y a 2 blocs associés au suiveur de ligne :

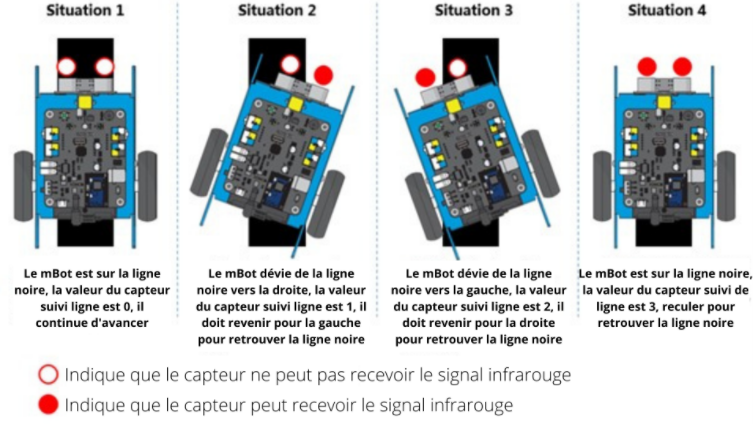
Ce premier bloc renverra un nombre entre 0 et 3 sur la base des valeurs suivantes :


Le deuxième bloc renvoie soit true soit false.
Programmation :
Les élèves doivent télécharger l’exercice à compléter.
Note importante : en général, pour le suivi de ligne, les élèves ont intuitivement tendance à programmer en utilisant des commandes utilisant le temps pour tourner à gauche ou à droite, ce qui rend très difficile le suivi de ligne. En effet, la notion de temps dépend de la puissance du moteur à ce moment-là. De plus, nous avons remarqué que les élèves, tout comme les adultes, sous-estiment la durée d’une seconde.
Au lieu de programmer ceci,
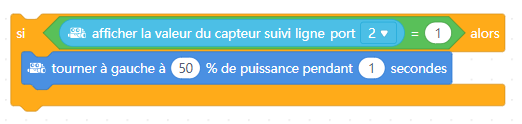
il est bien plus fiable d’utiliser le temps de réaction du capteur de suivi de ligne et de ralentir la puissance des moteurs
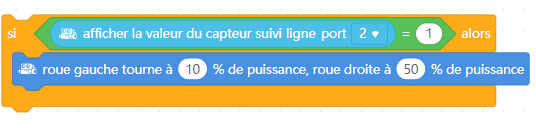
Malheureusement, pour la commande « reculer », on est obligé de travailler avec des secondes. Faites bien attention ici à ce que les élèves ne définissent pas une durée trop longue (pas plus d’une seconde).
Contrôleur de mission informatique/IT Mission Control : pour que les élèves puissent apprendre de leurs échecs – résultant de jugements et de programmations erronés – il est nécessaire que ces processus d’apprentissage par essais et erreurs soient documentés. Les élèves sont donc chargé·e·s de commenter sur mBlock les codages et les raisons pour lesquelles il·elle·s ont codé de cette manière ou d’une autre. Pour commenter une ligne de code, il faut faire un clic droit sur la ligne de code et cliquer sur « commenter » (voir ci-dessus la description de l’interface de programmation).
Mission 2
Contexte :
Le rover est de retour à sa base et reçoit l’ordre d’essayer de découvrir la vie sur Mars.
Le satellite ExoMars a trouvé des emplacements potentiellement intéressants et a donné les points GPS à visiter.
La base a également reçu un message d’urgence de Paxi, qui rencontre des problèmes techniques avec son vaisseau spatial non loin du Olympus Mons, la plus haute montagne de Mars.
Les élèves doivent d’abord sauver Paxi qui sera d’une grande aide pour notre mission étant donné sa bonne connaissance des paysages de Mars.
Mission :
Les élèves doivent
- suivre la ligne noire de la zone 3 à la zone 9.
- s’arrêter devant Olympus Mons grâce au capteur à ultrasons.
- produire un signal lumineux avec les lampes LED du mBot pour prévenir Paxi de leur arrivée
- faire « monter Paxi à bord » en offrant un autocollant de Paxi à l’élève
Programmation :
Les élèves doivent télécharger l’exercice à compléter.
Contrôleur de mission informatique/IT Mission Control : les élèves sont chargé·e·s de commenter leurs lignes de code sur mBlock.
Mission 3
Contexte :
Le satellite ExoMars a indiqué l’emplacement d’une grotte martienne à explorer, qui pourrait contenir de la vie. Les élèves doivent entrer dans la grotte et la scanner.
Mission :
Les élèves doivent
- suivre la ligne noire de la zone 9 à la zone 8
- s’arrêter à l’intérieur de la grotte lorsque le capteur de lumière détecte une baisse de l’intensité lumineuse.
- produire un signal sonore simulant un laser qui scanne l’intérieur de la grotte.
Programmation :
Les élèves doivent télécharger l’exercice à compléter.
Contrôleur de mission informatique/IT Mission Control : les élèves sont chargé·e·s de commenter leurs lignes de code sur mBlock.
Mission 4
Contexte :
Les élèves n’ont pas trouvé de vie à l’intérieur de la grotte de Mars, mais il reste un autre endroit prometteur.
Soudain, on entend le bruit d’une météorite qui s’écrase non loin de la grotte. Les élèves doivent se rendre sur le site du crash pour chercher une trace de vie.
Mission :
On simule le crash de la météorite en frappant dans les mains.
En utilisant le capteur de son, le mBot doit
- entendre le son du crash de la météorite grâce à son capteur de son.
- s’arrêter devant l’impact de la météorite.
- mesurer la température pour détecter une source d’eau chaude supérieure à 30 °C contenant de la vie.
- Diffuser une « chanson de la victoire », composée sur le mBot, lorsque la température est supérieure à 30 °C !
Programmation :
Télécharger l’exercice à compléter.
Notes importantes :
Préparez la source de chaleur juste avant de commencer cette mission.
Contrôleur de mission informatique/IT Mission Control : les élèves sont chargé·e·s de commenter leurs lignes de code sur mBlock.
M2
Instructions pour les élèves (devoir à domicile)
Lisez votre premier programme (à faire à la maison)
- Allez dans le menu Tutoriels à Programmes d’exemples
- Sélectionnez la scène à Happy Panda
- Appuyez sur « OK »
Traitez les tâches suivantes :
- Les blocs de couleurs donnent des instructions au panda. Essayez de découvrir ce que vous pouvez faire avec chaque bloc.
- Indiquez quelle action est déclenchée chez le panda par quel bloc de couleur du programme et notez-la sur une liste. Amenez cette liste au prochain cours.
- Essayez de comprendre quelles sont les fonctions du drapeau vert et du carré rouge.
- Changez le message en chinois dans le bloc « say » et notez ce que cela change lors de l’exécution du programme.
M3
Instructions pour les élèves : les missions
Écrivez votre premier programme : entraînement des pilotes
Voici votre premier exercice :
- Faites rouler le mBot tout droit sur la table devant vous.
- Arrêtez le mBot dès qu’il se trouve à moins de 10 cm d’un obstacle en utilisant le capteur à ultrasons. L’obstacle peut être votre main par exemple.
Missions
IT Mission Control : prenez en charge le IT Mission Control. Si le rover n’exécute pas l’ordre demandé et provoque par exemple un accident, la mission est un échec. Il est alors important de procéder à une analyse des erreurs afin d’améliorer le code. C’est pourquoi l’IT Mission Control commente les codes sur mBlock (clic droit avec le bouton de la souris –> commentaire).
Mission 1
Contexte :
Le rover se trouve au centre de la carte, dans une vallée asséchée, et reçoit l’ordre de retourner à sa base d’origine pour recevoir une nouvelle mission.
Mission :
Retournez à la base de la zone 3 en suivant la ligne noire à l’aide du capteur de suivi de ligne.
Aide :
Dans la bibliothèque d’instructions « Détection », il y a 2 blocs associés au suiveur de ligne :

Ce premier bloc renverra un nombre entre 0 et 3 sur base des valeurs suivantes :

Le deuxième bloc renvoie soit « vrai » soit « faux ».
Programmation :
Téléchargez l’exercice à compléter.
Mission 2
Contexte :
Le rover est de retour à sa base et reçoit l’ordre d’essayer de découvrir la vie sur Mars !
Le satellite ExoMars a trouvé des emplacements potentiellement intéressants et a donné les points GPS à visiter.
La base a également reçu un message d’urgence de Paxi, qui rencontre des problèmes techniques avec son vaisseau spatial non loin de Olympus Mons, la plus haute montagne de Mars.
Vous devez d’abord sauver Paxi qui sera d’une grande aide pour notre mission étant donné sa bonne connaissance des paysages de Mars.
Mission :
- Suivez la ligne noire de la zone 3 à la zone 9.
- Arrêtez-vous devant Olympus Mons grâce au capteur à ultrasons.
- Produisez un signal lumineux avec les lampes LED du mBot pour prévenir Paxi (la mascotte de ESERO) de votre arrivée.
- Faites « monter Paxi à bord » en prenant un autocollant de Paxi.
Programmation :
Téléchargez l’exercice à compléter.
Mission 3
Contexte :
Le satellite ExoMars a indiqué l’emplacement d’une grotte martienne à explorer, qui pourrait contenir de la vie. Vous devez entrer dans la grotte et la scanner.
Mission :
- Suivez la ligne noire de la zone 9 à la zone 8
- Arrêtez-vous à l’intérieur de la grotte lorsque le capteur de lumière détecte une baisse de l’intensité lumineuse.
- Produisez un signal sonore simulant un laser qui scanne l’intérieur de la grotte.
Programmation :
Téléchargez l’exercice à compléter.
Mission 4
Contexte :
Vous n’avez pas trouvé de vie à l’intérieur de la grotte de Mars, mais il reste un autre endroit prometteur.
Soudain, on entend le bruit d’une météorite qui s’écrase non loin de la grotte. Vous devez vous rendre au site du crash pour chercher une trace de vie.
Mission :
- Simulez le crash de la météorite en frappant dans les mains.
- Entendez le son du crash de la météorite (simulé par vos mains) grâce au capteur de son du mBot.
- Mesurez si la température à l’intérieur de la grotte est positive pour tester le capteur de température.
- Arrêtez-vous devant l’impact de la météorite.
- Mesurez la température pour détecter une source de chaleur supérieure à 30 °C contenant de la vie.
- Si la température est supérieure à 30 °C, diffusez une « chanson de la victoire » que vous avez composée sur le mBot !
Programmation :
Téléchargez l’exercice à compléter.
