
Das benötigte Material kann bei ESERO kostenlos ausgeliehen werden (kontaktieren Sie hierfür ESERO : contact@esero.lu oder +352 621 96 90 19).
4.3 Materialien
M1
M1 Anweisungen für Lehrer*innen
Vorstellung des Rovers mBot
Der mBot ist ein Roboter für Anfänger, der von der Firma MakeBlock entworfen wurde und den Unterricht und das Lernen des Roboter-Codings einfach und unterhaltsam gestaltet. Mit Schritt-für-Schritt-Anleitungen machen sich die Schüler*innen mit den Grundlagen der blockbasierten Programmierung vertraut, entwickeln ihr logisches Denken und ihre Gestaltungsfähigkeiten.
Wie jeder Roboter interagiert der mBot gemäß den Anweisungen, die er ausführen soll, mit seiner Umgebung.
Dafür kann er mithilfe seiner Sensoren Informationen sammeln und mit seinen Stellantrieben Aktionen ausführen.

Aktionen
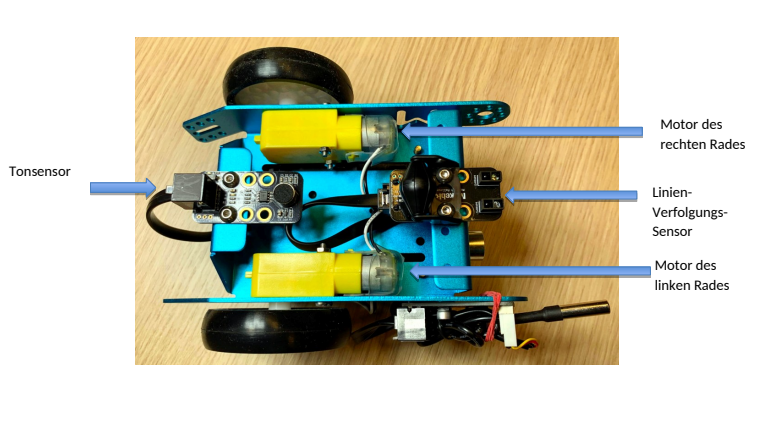
Dank seiner beiden voneinander unabhängigen Motoren, die jeweils ein Antriebsrad steuern, ist der Roboter in der Lage, sich fortzubewegen.
- Mithilfe eines Buzzers kann er Laute von sich geben.
- Dank der LED-Leuchten, deren Farbe einstellbar ist, kann er Licht abgeben.
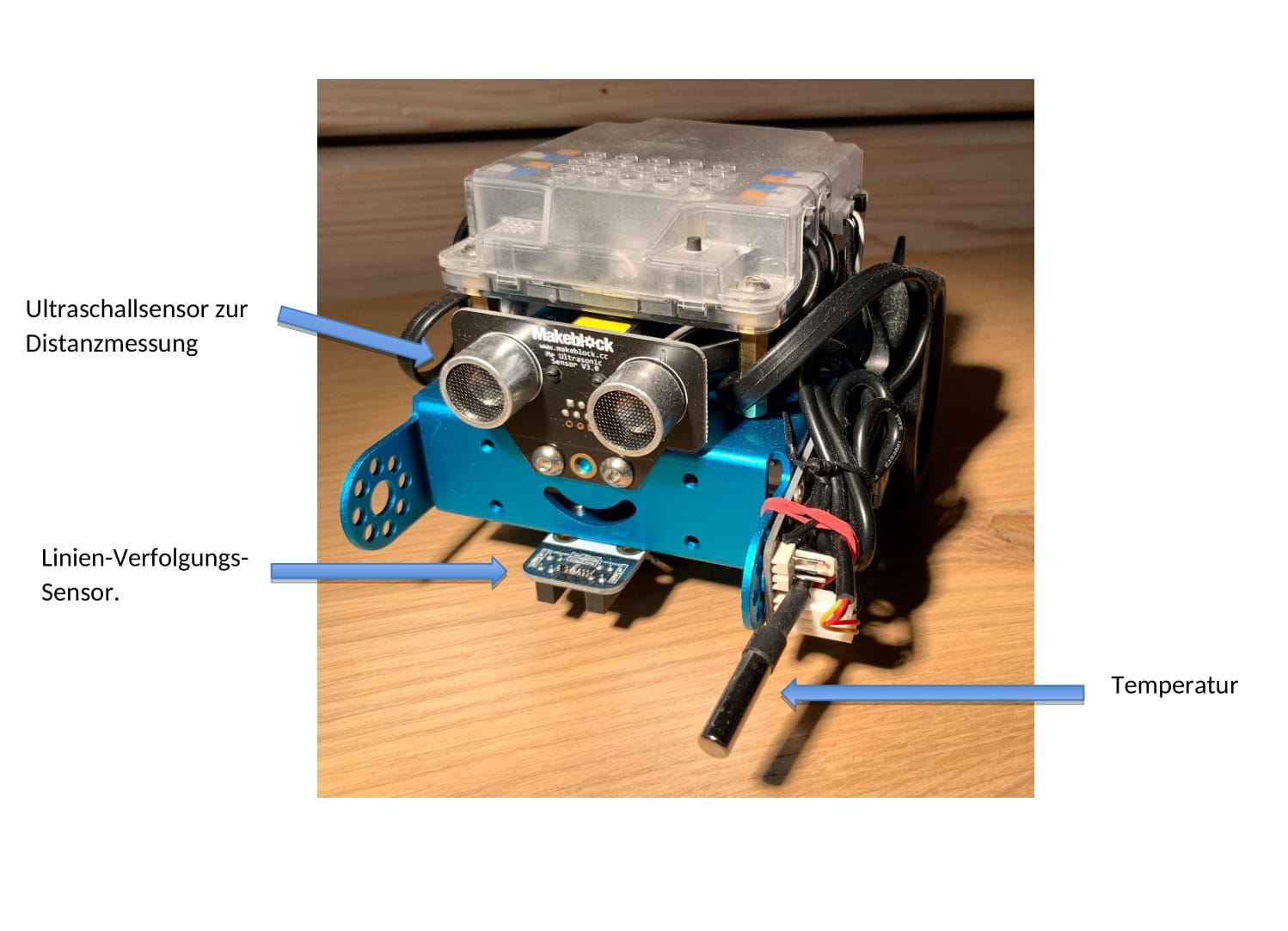
- Um mit seiner Umgebung zu interagieren und dort Informationen zu sammeln, befinden sich am Roboter:
-
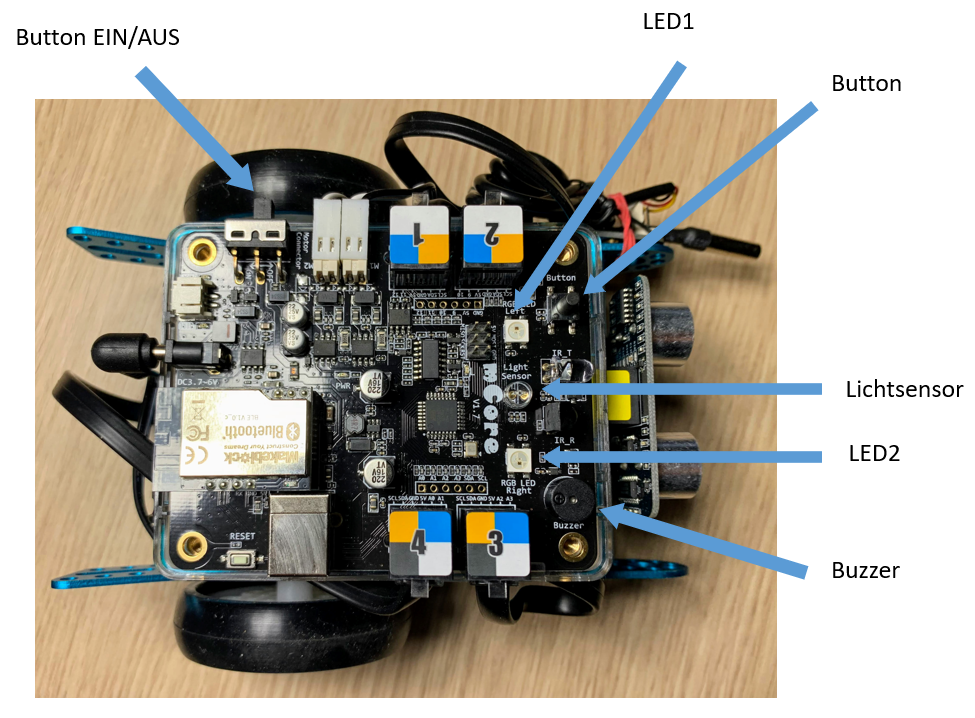
- ein ON/OFF-Schalter,
- ein Programmstart-Button,
- ein Modul, um der Linie am Boden zu folgen,
- ein Ultraschallmodul, mit dessen Hilfe er Hindernisse im Voraus „sehen“ und ihre Entfernung einschätzen kann,
- ein Lichtsensor, der ihm Informationen über das Umgebungslicht gibt,
- ein Tonsensor, der ihm Informationen über Umgebungsgeräusche gibt,
- ein Temperatursensor, der die Temperatur der Umgebungsluft misst,
- ein Linien-Verfolgungs-Sensor.
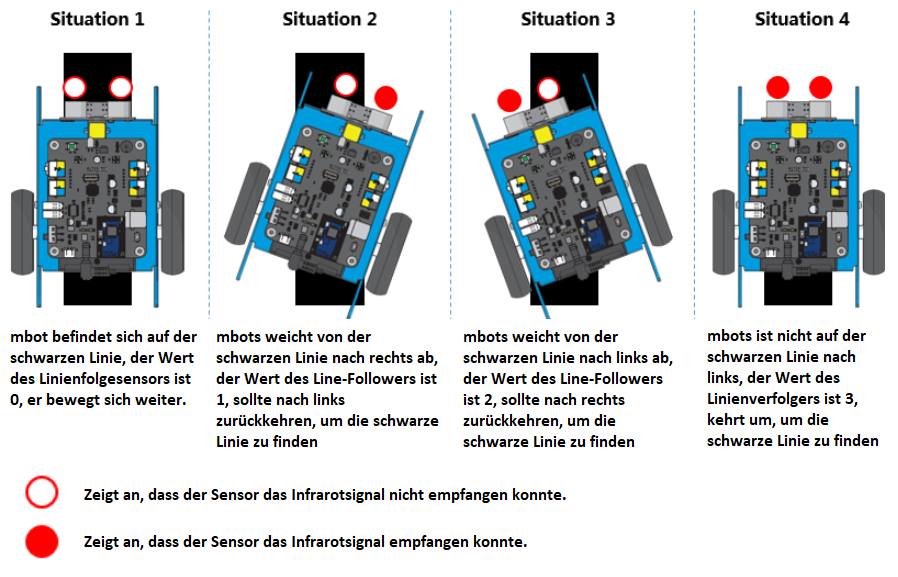
Der Linien-Verfolgungs-Sensor ist vorne am mBot angebrachtund mit zwei Sensoren ausgestattet, die eine weiße Oberfläche (in einem Bereich von 1 bis 2 cm) erkennen können, indem sie IR-Licht (Infrarot) aussenden und die Menge des reflektierten Lichts registrieren.

Wenn eine große Menge Licht reflektiert wird, kann man daraus ableiten, dass er sich in der Nähe einer weißen Fläche befindet. Wenn die Reflexion schwach ist, kann man daraus ableiten, dass die Fläche schwarz ist oder dass der Sensor sich nicht in der Nähe einer Fläche befindet.
Wo befinden sich die Buttons und die Sensoren?
Der Roboter mBot wird mit der Software mBlock programmiert. Diese Software kann in der PC-Version (auf Windows- oder Mac-Rechner) oder in der App-Version (für Android oder iOS) heruntergeladen werden. Alternativ kann auch die Web-Version der Software genutzt werden. Das ist besonders praktisch für die Hausaufgabe, die die Schüler*innen vor der Stunde erledigen müssen.
| Anwendung der Programmier-Software: | |
|
1. Öffnen Sie das Programm mBlock. |
 |
| 2. Wählen Sie oben links am Bildschirm Ihre Sprache, indem Sie auf klicken. |  |
|
3. Löschen Sie das Gerät CyberPi im Reiter „Geräte“ links, in dem Sie auf das Kreuzchen klicken. |
 |
|
4. Klicken Sie nun ebenfalls im Reiter „Geräte“ auf den Button „Hinzufügen“. |
 |
| 5. Wählen Sie den mBot und klicken Sie auf „OK“. |  |
| 6. Klicken Sie unten auf dem Bildschirm auf „Erweiterung“. |  |
| 7. Fügen Sie die Erweiterung „Gizmo erkennen“ hinzu. |  |
Beschreibung der Benutzeroberfläche
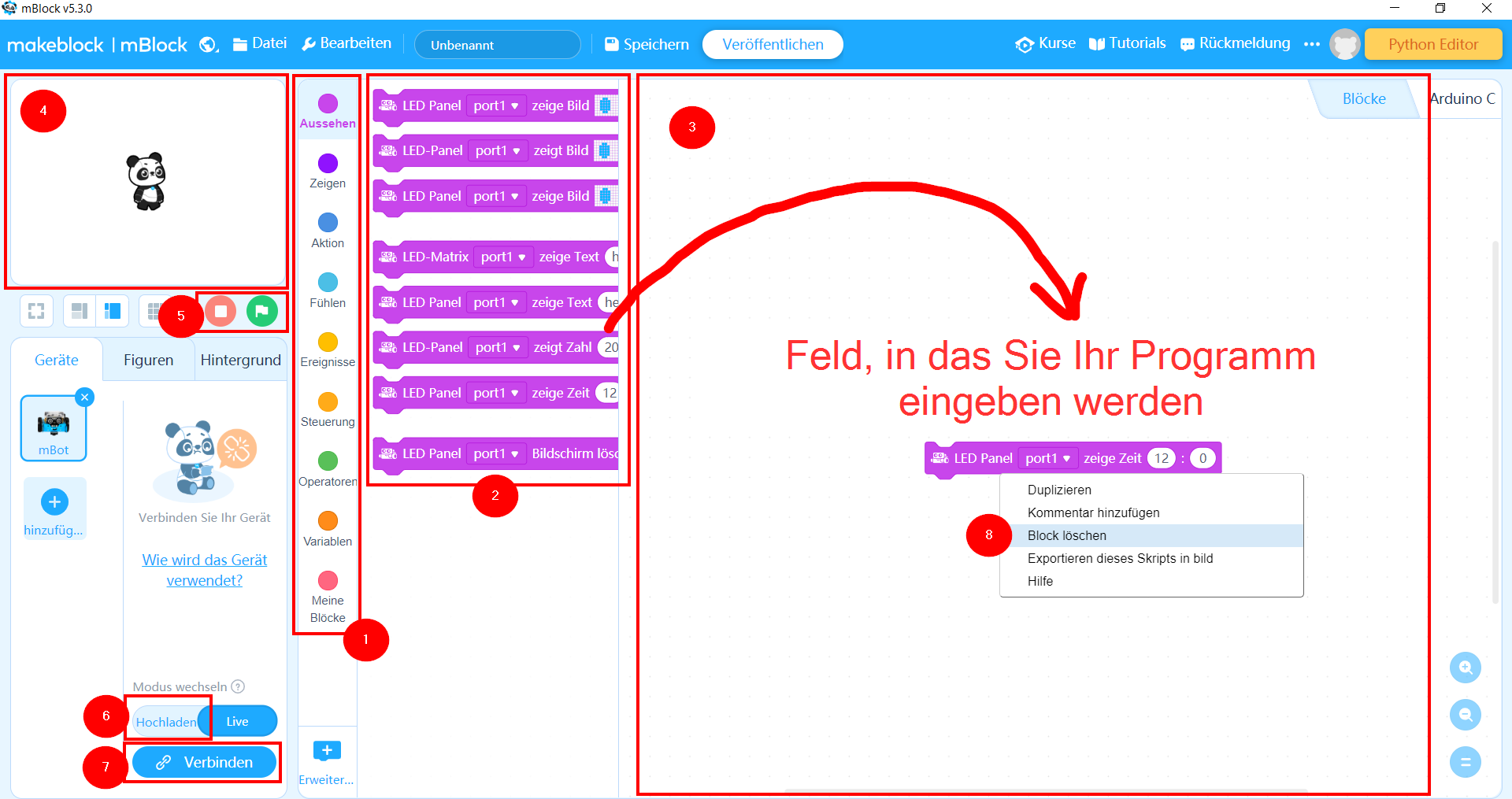
Zum Vergrößern auf das Bild klicken
Um das Programm zu erstellen, müssen Sie nur die Elemente aus der Bibliothek in den Bereich zur Programmerstellung ziehen.
Achtung, manchmal müssen sie ganz genau platziert werden, damit sie dort bleiben.
| (1) Auswahlbereich aus einer Befehlsbibliothek | (5) Start/Stopp des Programms, wenn Sie ein Bild programmieren |
| (2) Auswahlbereich eines Befehls für Drag&Drop in den Bereich (3) | (6) Button, um Ihr Programm in den mBot hochzuladen |
| (3) Feld, in das Sie Ihr Programm eingeben werden | (7) Button, um sich mit dem mBot zu verbinden |
| (4) Testbereich, um ein Bild anstelle des mBot zu programmieren | (8) Um einen Befehl zu löschen, Rechtsklick -> Block löschen |
Vorgehensweise, um das Programm an den mBot zu schicken:
- Stellen Sie den Roboter auf eine Unterlage und schließen Sie ihn an den Rechner an.
- Prüfen Sie am Roboter, ob der Schalter auf „ON“ steht.
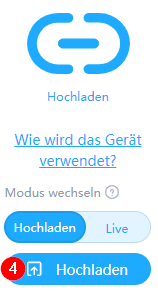
- Vergewissern Sie sich, dass der Button „Hochladen“ aktiviert ist. (1)
- Klicken Sie auf „Verbinden“. (2)
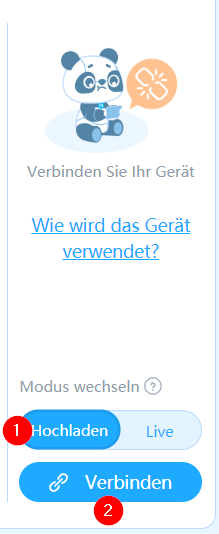
- Klicken Sie in der folgenden Anzeige nochmals auf „Verbinden“. (3)
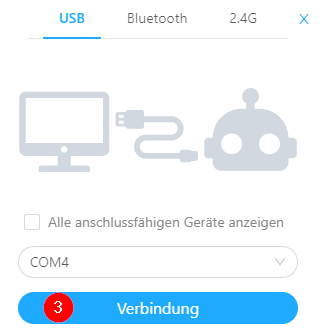
- Wenn die Verbindung hergestellt ist, klicken Sie auf „Hochladen“. (4)
Darstellung der Marskarte

Die Karte ist ein echtes Satellitenbild, das im November 2018 von dem Satelliten Mars Express der ESA aufgenommen wurde.
Sie ist in 9 Bereiche unterteilt, die bei der Beschreibung jeder Mission erwähnt werden:

Aufbau
- Stellen Sie das Foto der Marsbasis in die Ecke von Bereich 3.
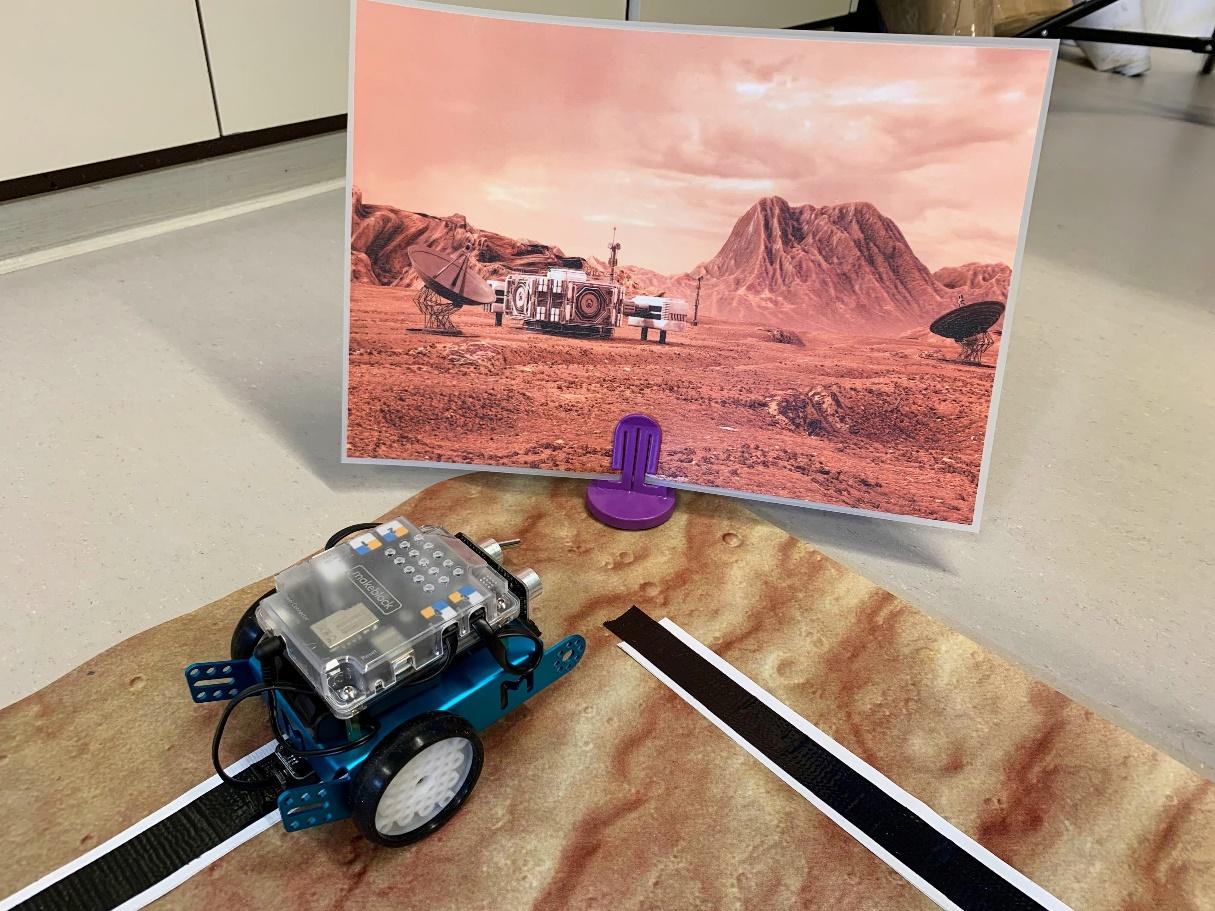
- Stellen Sie das Foto der Marslandschaft gleich neben die Karte, neben den Bereich 6.

- Stellen Sie das Bild des Olympus Mons senkrecht an das Ende der Strecke, unterhalb des Bereichs 9 der Karte.
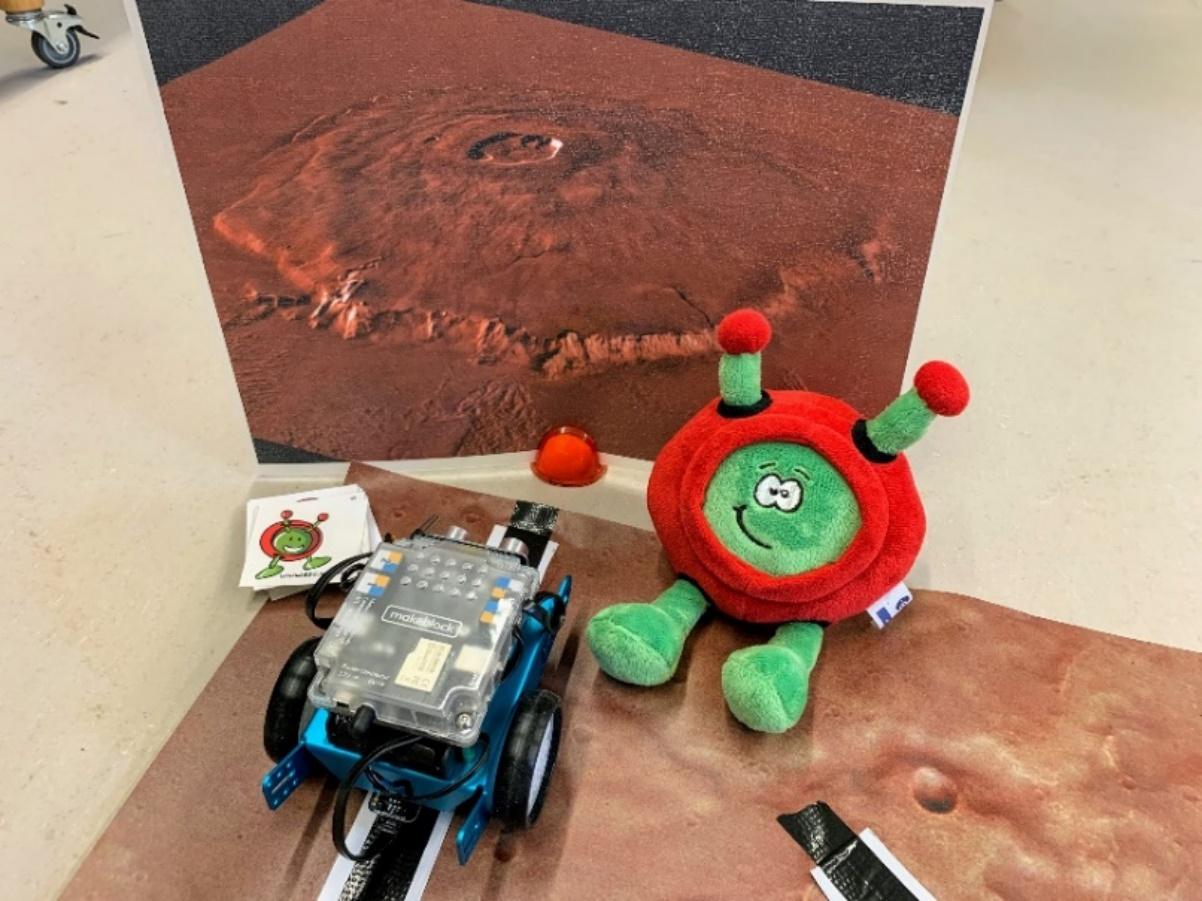
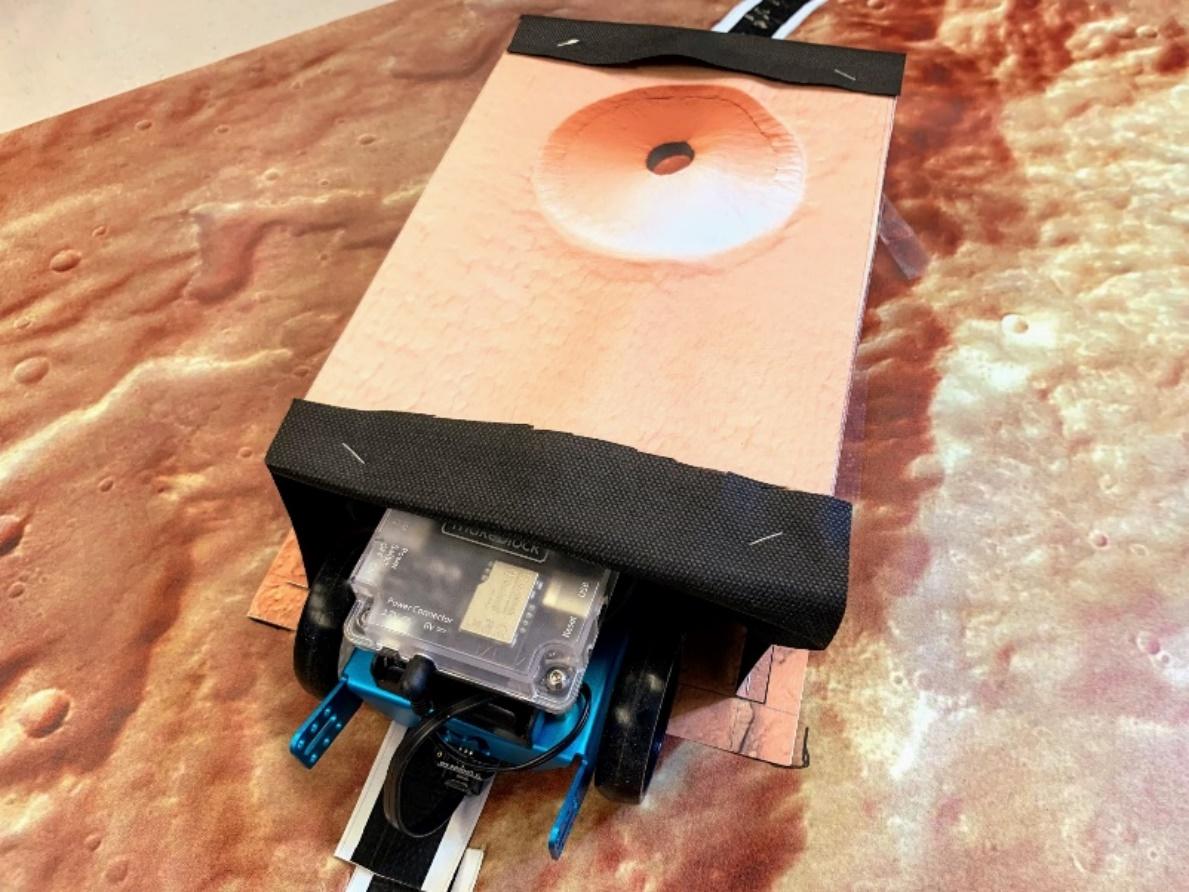
Platzieren Sie Paxi (das ESERO-Maskottchen) und die Paxi-Aufkleber neben den Olympus Mons. - Legen Sie die Marshöhle auf Bereich 8, kleben Sie sie mit Klebeband an die Karte, platzieren Sie das Stück schwarze Strecke, das durch die Höhle läuft, und kleben sie es ebenfalls an die Karte.
- Stellen Sie das Bild des Marskraters senkrecht an das Ende der Strecke in Bereich 1.
Stellen Sie eine Wärmequelle links an die Strecke, gleich vor den Marskrater.
Legen Sie das Bild des Bärtierchens unter die Wärmequelle und das Plüschbärtierchen neben die Wärmequelle.
Vorbereitung der Stunde
- Wir empfehlen dringend, die Lösungen zu den 4 Missionen zu lesen, zu verstehen und zu testen, bevor Sie die Stunde mit den Schüler*innen beginnen.
- Vergewissern Sie sich, dass sich eine Lithium-Batterie oder AA-Batterien im mBot befinden.
- Schließen Sie den Rover mithilfe des USB-Kabels an Ihren Rechner an.
- Drücken Sie den ON-Button.
Das erste eigene Programm lesen
Um sich mit dem Programm mBlock vertraut zu machen, müssen die Schüler*innen zu Hause eine erste Übung machen, um die Stunde vorzubereiten. Diese Übung kann in der Web-Version des Programms mBlock durchgeführt werden. Die SuS müssen also nichts installieren. Bitten Sie die SuS, folgendes zu tun:
- Im Menü Tutorials -> Beispielprogramme öffnen
- Die Szene -> Happy Panda wählen
- Auf „OK“ drücken
Vergewissern Sie sich, dass die SuS Folgendes verstanden haben:
- wie der Panda durch die Farbblöcke gesteuert wird. Die Farbblöcke sind die Befehle, die er befolgt. Die Blöcke müssen nicht im Detail erklärt werden. Die Schüler*innen müssen selbst herausfinden, was sie mit jedem Block tun können.
- die Funktion der grünen Fahne und des roten Vierecks.
Dann werden die Schüler*innen gebeten, die chinesische Botschaft im Block „say“ zu ändern und zu zeigen, was dies bei der Ausführung des Programms ändert. Ermutigen Sie sie, mit dem Programm zu spielen und die Funktionen selbst herauszufinden.
Los geht‘s!
Die Stunde kann beginnen. Das Programmierspiel ist in 4 Missionen gegliedert, denen eine Herausforderung namens Pilottraining vorangeht. Die Missionen müssen gelöst werden, indem der mBot so programmiert wird, dass er seine speziellen Aufgaben ausführt.
Da dieses Modul für viele Schüler*innen den ersten Kontakt mit Scratch darstellt, müssen die SuS nicht jede Übung von Grund auf programmieren. Am Ende jeder Mission gibt es Dateien. Diese Dateien beinhalten einen Teil der Lösung. Die Schüler*innen müssen also nur die Datei ergänzen, um zur endgültigen Lösung zu gelangen. Hierzu müssen die SuS die Dateien auf ihrem Rechner speichern. Über die mBlock-Benutzeroberfläche müssen sie sie dann auf ihrem Rechner öffnen.
Natürlich können Sie in Klassen, die bereits Erfahrung mit Scratch haben, diese Dateien weglassen und die SuS die Missionen von Grund auf programmieren lassen.
Die Missionen sind so konzipiert, dass der Schwierigkeitsgrad ansteigt. Zunächst sollen die Schüler*innen sich auf die Werte der Variablen (Mission 1) konzentrieren, dann auf die Logik des Programms (Mission 2) und schließlich beide Aspekte zusammen betrachten (Mission 3 und Mission 4).
Das erste eigene Programm schreiben: Pilottraining
Bei dieser ersten Übung besteht die Aufgabe darin,
- den mBot auf dem Tisch geradeaus fahren zu lassen,
- den mBot mithilfe des Ultraschallsensors zu stoppen, sobald er sich in weniger als 10 cm Entfernung von einem Hindernis befindet. Das Hindernis kann die Hand des/der Schüler*in, ein Buch oder irgendein anderer Gegenstand sein.
Mission 1
Kontext:
Der Rover befindet sich in der Mitte der Karte, in einem ausgetrockneten Tal, und erhält den Befehl, zur Basis zurückzukehren, um mit einer neuen Mission beauftragt zu werden.
Mission:
Die Schüler*innen müssen zur Basis in Bereich 3 zurückkehren, indem sie mit dem Linien-Verfolgungs-Sensor der schwarzen Linie folgen.
In der Befehlsbibliothek „Fühlen“ gibt es 2 Blöcke, die dem Linienverfolger zugeordnet sind:

In diesem ersten Block wird eine Zahl zwischen 0 und 3 auf der Grundlage der folgenden Werte zurückgeben:


Der zweite Block gibt „true“ oder „false“ zurück.
Programmierung:
Die Schüler*innen müssen die Übung zum Ergänzen herunterladen.
Wichtiger Hinweis: Im Allgemeinen tendieren Schüler*innen bei der Linienverfolgung intuitiv dazu, diese Befehle mit Zeitangaben zu programmieren, um nach links oder rechts zu drehen, was die Linienverfolgung sehr schwierig macht, da der Begriff „Zeit“ von der Motorleistung zu diesem Zeitpunkt abhängt. Außerdem haben wir festgestellt, dass Schüler*innen, und auch Erwachsene, die Länge einer Sekunde unterschätzen.
Anstatt dies also so zu programmieren:
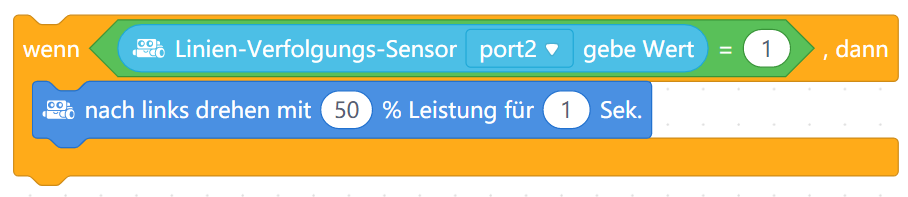
ist es viel sicherer, die Reaktionszeit des Linien-Verfolgungs-Sensors zu nutzen und die Motorleistung zu bremsen:
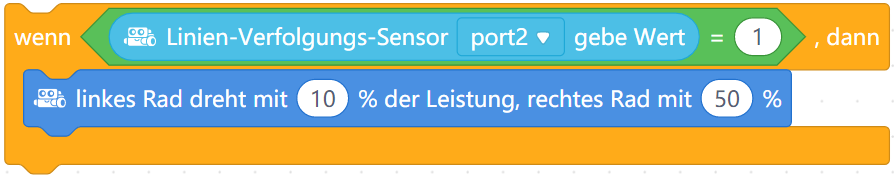
Beim Befehl „Rückwärts fahren“ ist man leider gezwungen, mit Sekunden zu arbeiten. Achten Sie genau darauf, dass die SuS nicht mit zu hohen Zeitangaben arbeiten (nicht mehr als eine Sekunde).
Computer Mission Controller/IT Mission Control: Damit die Schüler*innen aus ihren Fehlern lernen, also aus falschen Einschätzungen und Programmierungen, müssen diese Lernschritte durch Versuch und Irrtum dokumentiert werden. Die Schüler*innen erhalten daher die Aufgabe, in mBlock Kommentare zum Coding und zu den Gründen, warum das Coding so oder anders erfolgte, zu notieren. Um eine Codezeile zu kommentieren, klickt man mit der rechten Maustaste auf die Codezeile und dann auf „Kommentar hinzufügen“ (siehe Beschreibung der Benutzeroberfläche oben).
Mission 2
Kontext:
Der Rover ist zur Basis zurückgekehrt und erhält den Befehl, den Versuch zu unternehmen, Leben auf dem Mars zu finden.
Der Satellit ExoMars hat potenziell interessante Stellen gefunden und die entsprechenden GPS-Daten dieser Stellen angegeben.
Die Basis hat außerdem einen Notruf von Paxi empfangen, der technische Probleme mit seinem Raumfahrzeug in der Nähe des Olympus Mons, dem höchsten Berg auf dem Mars, hat.
Die Schüler*innen müssen zunächst Paxi retten, der sich für unsere Mission als sehr hilfreich erweisen wird, da er die Marslandschaften gut kennt.
Mission:
Die Schüler*innen müssen
- der schwarzen Linie von Bereich 3 zu Bereich 9 folgen,
- mithilfe des Ultraschallsensors vor dem Olympus Mons anhalten,
- mit den LED-Leuchten des mBot ein Lichtsignal erzeugen, um Paxi über ihre Ankunft zu informieren,
- „Paxi an Bord nehmen“, indem der/die Schüler*in einen Paxi-Aufkleber erhält.
Programmierung:
Die Schüler*innen müssen die Übung zum Ergänzen herunterladen.
Computer Mission Controller/IT Mission Control: Die Schüler*innen sollen ihre Codezeilen in mBlock kommentieren.
Mission 3
Kontext:
Der Satellit ExoMars hat die Position einer Marshöhle angegeben, die erforscht werden soll und Leben enthalten könnte. Die Schüler*innen müssen in die Höhle hinabsteigen und sie scannen.
Mission:
Die Schüler*innen müssen
- der schwarzen Linie von Bereich 9 zu Bereich 8 folgen,
- im Inneren der Höhle anhalten, wenn der Lichtsensor eine geringe Lichtstärke ermittelt,
- ein Tonsignal erzeugen, das einen Laserstrahl simuliert, der das Innere der Höhle scannt.
Programmierung:
Die Schüler*innen müssen die Übung zum Ergänzen herunterladen.
Computer Mission Controller/IT Mission Control: Die Schüler*innen sollen ihre Codezeilen in mBlock kommentieren.
Mission 4
Kontext:
Die Schüler*innen haben kein Leben in der Marshöhle gefunden, aber es gibt noch einen anderen vielversprechenden Ort.
Plötzlich hört man das Geräusch eines Meteoriten, der in der Nähe der Höhle einschlägt. Die SuS müssen sich zur Einschlagstelle begeben, um Spuren von Leben zu suchen.
Mission:
Man simuliert einen Meteoriteneinschlag, indem man in die Hände klatscht.
Mithilfe des Tonsensors muss der mBot
- das Geräusch des Meteoriteneinschlags abwarten,
- vor der Stelle des Meteoriteneinschlags anhalten,
- die Temperatur messen, um eine Heißwasserquelle mit über 30°C zu finden, die Leben enthält,
- eine auf dem mBot komponierte „Siegeshymne“ abspielen, wenn die Temperatur über 30°C liegt!
Programmierung:
Die Schüler*innen müssen die Übung zum Ergänzen herunterladen.
Wichtige Hinweise:
Bereiten Sie die Wärmequelle vor, kurz bevor sie mit dieser Mission beginnen.
Computer Mission Controller/IT Mission Control: Die Schüler*innen sollen ihre Codezeilen in mBlock kommentieren.
M2
Anweisungen für Schüler*innen (Hausaufgabe)
Lies dein erstes Programm (Hausaufgabe)
- Öffne im Tutorials-Menü die Beispielprogramme
- Wähle die Szene -> Happy Panda
- Drück auf „OK“
Bearbeite folgende Aufgaben:
- Die Farbblöcke geben dem Panda Anweisungen. Versuche herauszufinden, was du mit jedem Block tun kannst.
- Gib an, welche Aktion beim Panda durch welchen Farbblock des Programms ausgelöst wird und notiere sie in einer Liste. Bringe diese Liste zur nächsten Stunde mit.
- Versuche zu verstehen, welche Funktion die grüne Fahne und das rote Quadrat haben.
- Ändere die chinesische Botschaft im Block „say“ und notiere, was das bei der Ausführung des Programms ändert.
M3
Anweisungen für Schüler*innen: die Missionen
Das erste eigene Programm schreiben: Pilottraining
Hier also eure erste Übung:
▪ Lasst den mBot auf dem Tisch geradeaus fahren.
▪ Stoppt den mBot mithilfe des Ultraschallsensors, sobald er sich in weniger als 10 cm Entfernung von einem Hindernis befindet. Das Hindernis kann zum Beispiel eure Hand sein.
Missionen
IT Mission Control: Übernehmt die IT Mission Control: Wenn der Rover den gegebenen Befehl nicht ausführt und zum Beispiel einen Unfall verursacht, ist die Mission gescheitert. Dann ist es wichtig, dass ihr die Fehler analysiert, um den Code zu verbessern. Deshalb erstellt die IT Mission Control Kommentare zu den Codes in mBlock (Klick mit der rechten Maustaste –> Kommentar hinzufügen).
Mission 1
Kontext:
Der Rover befindet sich in der Mitte der Karte, in einem ausgetrockneten Tal, und erhält den Befehl, zur Basis zurückzukehren, um mit einer neuen Mission beauftragt zu werden.
Mission:
Kehrt zur Basis in Bereich 3 zurück, indem ihr mit dem Linien-Verfolgungs-Sensor der schwarzen Linie folgt.
Hilfe:
In der Befehlsbibliothek „Fühlen“ gibt es 2 Blöcke, die dem Linienverfolger zugeordnet sind:
Dieser erste Block wird eine Zahl zwischen 0 und 3 auf der Grundlage der folgenden Werte zurückgeben:
Der zweite Block gibt „richtig“ oder „falsch“ zurück.
Programmierung:
→ Übung zum Ergänzen herunterladen.
Mission 2
Kontext:
Der Rover ist zur Basis zurückgekehrt und erhält den Befehl, den Versuch zu unternehmen, Leben auf dem Mars zu finden!
Der Satellit ExoMars hat potenziell interessante Stellen gefunden und die entsprechenden GPS-Daten dieser Stellen angegeben.
Die Basis hat außerdem einen Notruf von Paxi empfangen, der technische Probleme mit seinem Raumfahrzeug in der Nähe des Olympus Mons, dem höchsten Berg auf dem Mars, hat.
Ihr müsst zunächst Paxi retten, der sich für unsere Mission als sehr hilfreich erweisen wird, da er die Marslandschaften gut kennt.
Mission:
- Folgt der schwarzen Linie von Bereich 3 zu Bereich 9.
- Haltet mithilfe des Ultraschall-Sensors vor dem Olympus Mons an.
- Erzeugt mit den LED-Leuchten des mBot ein Lichtsignal, um Paxi (das ESERO-Maskottchen) über eure Ankunft zu informieren.
- „Nehmt Paxi an Bord“, indem ihr einen Paxi-Aufkleber nehmt.
Programmierung:
→ Übung zum Ergänzen herunterladen.
Mission 3
Kontext:
Der Satellit ExoMars hat die Position einer Marshöhle angegeben, die erforscht werden soll und Leben enthalten könnte. Ihr müsst in die Höhle hinabsteigen und sie scannen.
Mission:
- Folgt der schwarzen Linie von Bereich 9 zu Bereich 8.
- Haltet im Inneren der Höhle an, wenn der Lichtsensor eine geringe Lichtstärke ermittelt.
- Erzeugt ein Tonsignal, das einen Laserstrahl simuliert, der das Innere der Höhle scannt.
Programmierung:
→ Übung zum Ergänzen herunterladen.
Mission 4
Kontext:
Ihr habt kein Leben in der Marshöhle gefunden, aber es gibt noch einen anderen vielversprechenden Ort.
Plötzlich hört man das Geräusch eines Meteoriten, der in der Nähe der Höhle einschlägt. Ihr müsst euch zur Einschlagstelle begeben, um Spuren von Leben zu suchen.
Mission:
- Simuliert den Meteoriteneinschlag, indem ihr in die Hände klatscht.
- Wartet das Geräusch des Meteoriteneinschlags (simuliert durch eure Hände) mithilfe des Tonsensors des mBot ab.
- Haltet vor der Stelle des Meteoriteneinschlags an.
- Messt die Temperatur, um eine Heißwasserquelle mit über 30°C zu finden, die Leben enthält.
- Spielt eine auf dem mBot komponierte „Siegeshymne“ ab, wenn die Temperatur über 30°C liegt!
Programmierung:
→ Übung zum Ergänzen herunterladen.
